


























































































































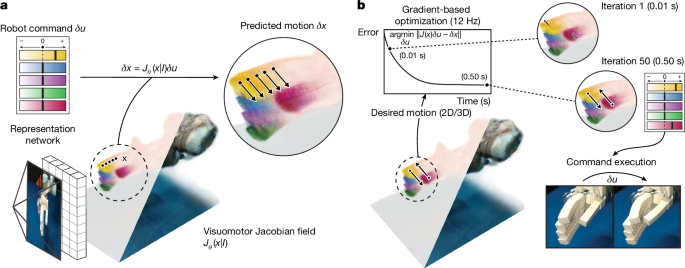
Controlling diverse robots by inferring Jacobian fields with deep networks
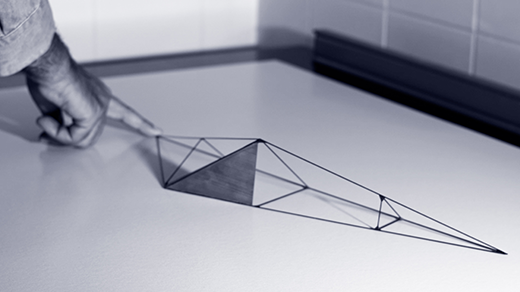
Nature, Published online: 25 June 2025; doi:10.1038/s41586-025-09170-0An approach that learns models of robots from video capture can predict the 3D motion outcomes of motor commands, enabling accurate control of a range of soft, biologically inspired robots from a single video camera.
Nature, Published online: 25 June 2025; doi:10.1038/s41586-025-09170-0An approach that learns models of robots from video capture can predict the 3D motion outcomes of motor commands, enabling accurate control of a range of soft, biologically inspired robots from a single video camera.